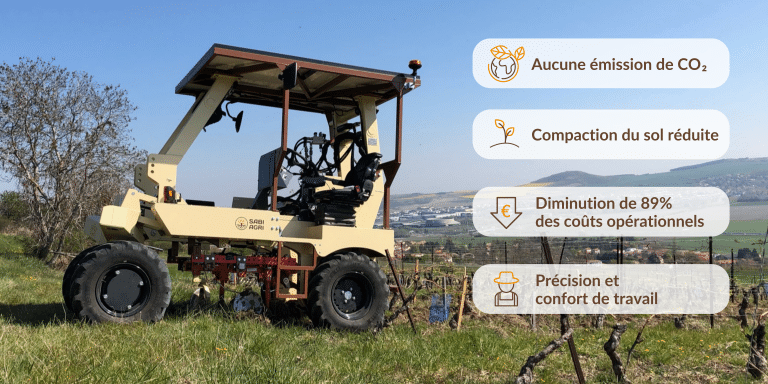
The Joint Laboratory TIARA associating SABI AGRI and the research unit INRAE TSCF aims to develop autonomous robotic behaviors on SABI AGRI machines in order to facilitate the agroecological transition.
The agricultural environment is complex (soil type, weather, crop identity…) and involves a wide range of tasks to be accomplished. Thus, in 2022, the work focused on the development of a multiple perception framework. It consists in automatically changing control strategies (Lidar vegetation tracking and GPS rtk trajectory tracking) at work according to the conditions of the agrosystem. In this context, particular attention was paid to the accuracy of the work performed in order to be in line with the realities of the field.
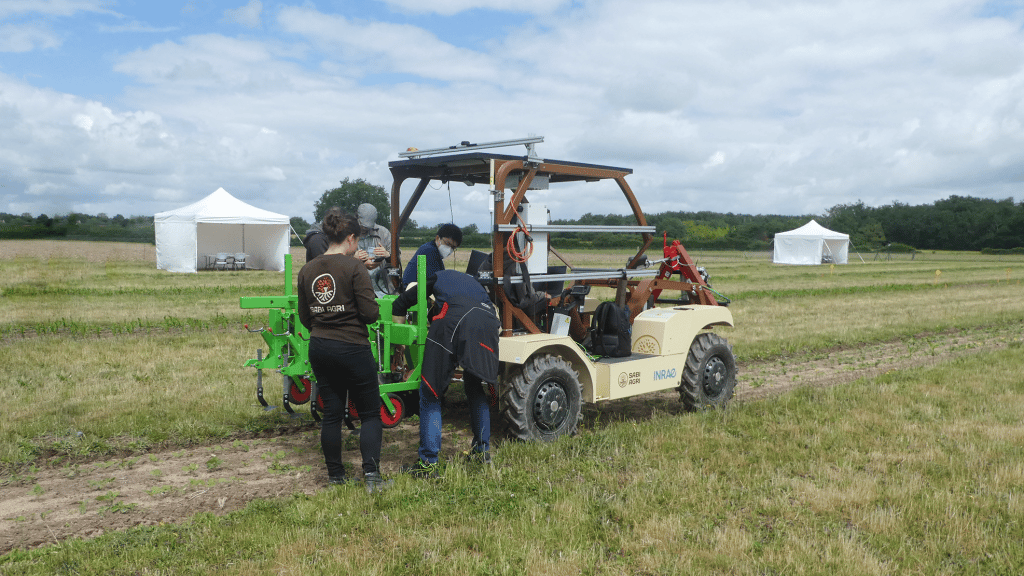
This work was evaluated in the Acre competition (Agri-food Competition for Robot Evaluation) of the European Metrics project. It consisted in testing the developments in different field crops (maize and beans) during autonomous navigation and autonomous weeding of the plot. The results demonstrated the robustness of this strategy and a centimetric precision.
These developments have been published in the journal AgriEngineering 2022, 4(3), 770-788.
In parallel, an action on the remote supervision of the work of the robots was launched through a communication interface allowing to visualize the work of the robots in live. The understanding of the remote operation of autonomous machines is crucial to ensure the dissemination and acceptance of agricultural robotics.
Finally, for the realization of agroecological practices, it is necessary to integrate a dynamic approach of the agricultural tools coupled to SABI AGRI machines. For example,managing the depth of soil working will allow to minimize the impact of the practice on the soil and thus optimize the biological regulations. This work will start at the beginning of 2023 with the recruitment of a PhD student in CIFRE thesis.